You can not select more than 25 topics
Topics must start with a letter or number, can include dashes ('-') and can be up to 35 characters long.
73 lines
2.7 KiB
73 lines
2.7 KiB
|
2 months ago
|
# rs-save-to-disk Sample
|
||
|
|
|
||
|
|
## Overview
|
||
|
|
|
||
|
|
This sample demonstrates how to configure the camera for streaming in a textual environment and save depth and color data to PNG format. In addition, it touches on the subject of [per-frame metadata](../../doc/frame_metadata.md)
|
||
|
|
|
||
|
|
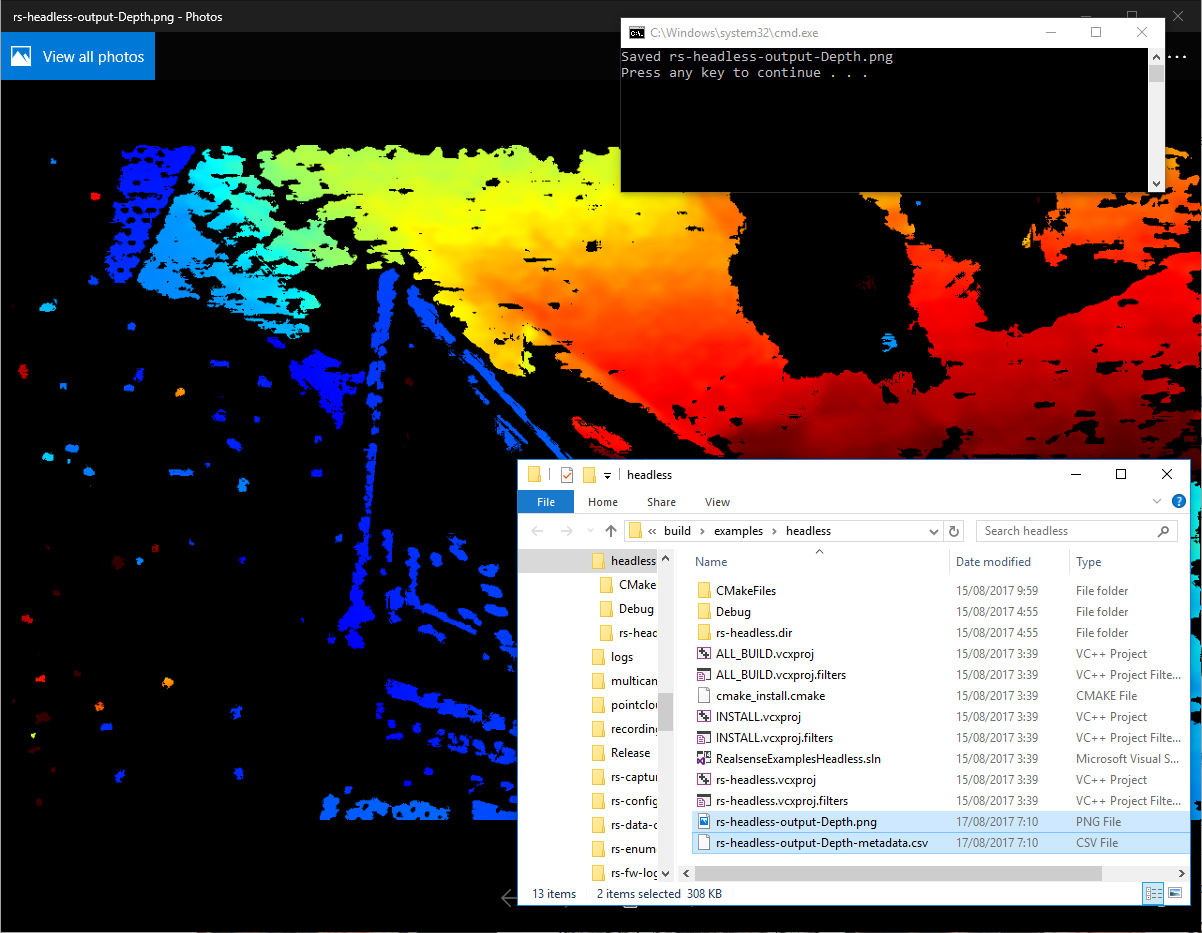
## Expected Output
|
||
|
|
The application should run for about a second and exit after saving PNG and CSV file to disk:
|
||
|
|
|
||
|
|
|
||
|
|
## Code Overview
|
||
|
|
|
||
|
|
Similar to the [first tutorial](../capture/) we include the Cross-Platform API:
|
||
|
|
```cpp
|
||
|
|
#include <librealsense2/rs.hpp> // Include RealSense Cross Platform API
|
||
|
|
```
|
||
|
|
|
||
|
|
We are using [nothings/stb](https://github.com/nothings/stb) to quickly save data to disk in PNG format:
|
||
|
|
```cpp
|
||
|
|
// 3rd party header for writing png files
|
||
|
|
#define STB_IMAGE_WRITE_IMPLEMENTATION
|
||
|
|
#include "stb_image_write.h"
|
||
|
|
```
|
||
|
|
|
||
|
|
We start like the last time by defining depth colorizer and starting the pipeline:
|
||
|
|
```cpp
|
||
|
|
// Declare depth colorizer for pretty visualization of depth data
|
||
|
|
rs2::colorizer color_map;
|
||
|
|
|
||
|
|
// Declare RealSense pipeline, encapsulating the actual device and sensors
|
||
|
|
rs2::pipeline pipe;
|
||
|
|
// Start streaming with default recommended configuration
|
||
|
|
pipe.start();
|
||
|
|
```
|
||
|
|
|
||
|
|
We prefer not to save the absolute first frame that arrives from the device, but rather wait for auto-exposure to stabalize:
|
||
|
|
```cpp
|
||
|
|
// Capture 30 frames to give autoexposure, etc. a chance to settle
|
||
|
|
for (auto i = 0; i < 30; ++i) pipe.wait_for_frames();
|
||
|
|
```
|
||
|
|
|
||
|
|
Intel® RealSense™ devices are not limited to just video streaming, some can offer motion tracking and 6-DOF positioning. For this example we are only interested in video frames, however:
|
||
|
|
```cpp
|
||
|
|
// We can only save video frames as pngs, so we skip the rest
|
||
|
|
if (auto vf = frame.as<rs2::video_frame>())
|
||
|
|
```
|
||
|
|
|
||
|
|
To better visualize the depth data, we apply the colorizer on any incoming depth frames:
|
||
|
|
```cpp
|
||
|
|
// Use the colorizer to get an rgb image for the depth stream
|
||
|
|
if (vf.is<rs2::depth_frame>()) vf = color_map(frame);
|
||
|
|
```
|
||
|
|
|
||
|
|
Then we save frame data to PNG:
|
||
|
|
```cpp
|
||
|
|
stbi_write_png(png_file.str().c_str(), vf.get_width(), vf.get_height(),
|
||
|
|
vf.get_bytes_per_pixel(), vf.get_data(), vf.get_stride_in_bytes());
|
||
|
|
```
|
||
|
|
|
||
|
|
Each frame may come with some metadata feilds. We iterate over all possible metadata feilds and save to CSV these that are available:
|
||
|
|
```cpp
|
||
|
|
// Record all the available metadata attributes
|
||
|
|
for (size_t i = 0; i < RS2_FRAME_METADATA_COUNT; i++)
|
||
|
|
{
|
||
|
|
if (frm.supports_frame_metadata((rs2_frame_metadata)i))
|
||
|
|
{
|
||
|
|
csv << rs2_frame_metadata_to_string((rs2_frame_metadata)i) << ","
|
||
|
|
<< frm.get_frame_metadata((rs2_frame_metadata)i) << "\n";
|
||
|
|
}
|
||
|
|
}
|
||
|
|
```
|
||
|
|
Please see [per-frame metadata](../../doc/frame_metadata.md) for more information.
|