You can not select more than 25 topics
Topics must start with a letter or number, can include dashes ('-') and can be up to 35 characters long.
244 lines
10 KiB
244 lines
10 KiB
|
2 months ago
|
RealSense with Open3D
|
||
|
|
=====================
|
||
|
|
|
||
|
|
[Open3D](http://www.open3d.org/) is an open-source library that supports rapid
|
||
|
|
development of software for 3D data processing, including scene reconstruction,
|
||
|
|
visualization and 3D machine learning.
|
||
|
|
|
||
|
|
RealSense (`librealsense` SDK v2) is integrated into Open3D (v0.12+) and you can
|
||
|
|
use it through both C++ and Python APIs without a separate `librealsense` SDK
|
||
|
|
installation on Linux, macOS and Windows. Older versions of Open3D support
|
||
|
|
RealSense through a separate install of `librealsense` SDK v1 and `pyrealsense`.
|
||
|
|
|
||
|
|
Obtaining Open3D with RealSense support
|
||
|
|
---------------------------------------
|
||
|
|
|
||
|
|
Please refer to [Open3D
|
||
|
|
documentation](http://www.open3d.org/docs/latest/introduction.html) for more
|
||
|
|
details such as:
|
||
|
|
- Obtaining Open3D source code and building from source.
|
||
|
|
- Building C++ projects using the Open3D library.
|
||
|
|
- Tutorials and examples.
|
||
|
|
- C++ and Python API documentation.
|
||
|
|
|
||
|
|
### Python
|
||
|
|
|
||
|
|
Install Open3D from PyPI (a virtual environment is recommended):
|
||
|
|
|
||
|
|
pip install open3d
|
||
|
|
|
||
|
|
### Compile from source (C++)
|
||
|
|
|
||
|
|
To build Open3D from source with RealSense support, set
|
||
|
|
`BUILD_LIBREALSENSE=ON` at CMake config step. You can add other
|
||
|
|
configuration options as well (e.g.: `BUILD_GUI=ON` and
|
||
|
|
`BUILD_PYTHON_MODULE=ON` may be useful).
|
||
|
|
|
||
|
|
cmake -D BUILD_LIBREALSENSE=ON -D <OTHER_FLAGS> /path/to/Open3D/source/
|
||
|
|
|
||
|
|
Reading from RealSense bag files
|
||
|
|
--------------------------------
|
||
|
|
|
||
|
|
### Sample RealSense bag files
|
||
|
|
|
||
|
|
You con download sample RealSense bag datasets with this script (in the Open3D repository):
|
||
|
|
|
||
|
|
python examples/python/reconstruction_system/scripts/download_dataset.py L515_test
|
||
|
|
|
||
|
|
Check the script for more RS bag datasets.
|
||
|
|
|
||
|
|
Here is a C++ code snippet that shows how to read a RealSense bag file
|
||
|
|
recorded with Open3D or the `realsense-viewer`. Note that general ROSbag
|
||
|
|
files are not supported. See more details and available functionality
|
||
|
|
(such as getting timestamps, aligning the depth stream to the color
|
||
|
|
stream and getting intrinsic calibration) in the C++ API in the
|
||
|
|
[RSBagReader
|
||
|
|
documentation](http://www.open3d.org/docs/latest/cpp_api/classopen3d_1_1t_1_1io_1_1_r_s_bag_reader.html)
|
||
|
|
|
||
|
|
#include <open3d/Open3D.hpp>
|
||
|
|
using namespace open3d;
|
||
|
|
t::io::RSBagReader bag_reader;
|
||
|
|
bag_reader.Open(bag_filename);
|
||
|
|
auto im_rgbd = bag_reader.NextFrame();
|
||
|
|
while (!bag_reader.IsEOF()) {
|
||
|
|
// process im_rgbd.depth_ and im_rgbd.color_
|
||
|
|
im_rgbd = bag_reader.NextFrame();
|
||
|
|
}
|
||
|
|
bag_reader.Close();
|
||
|
|
|
||
|
|
Here is the corresponding Python code. The Python API has equivalent functionality:
|
||
|
|
|
||
|
|
import open3d as o3d
|
||
|
|
bag_reader = o3d.t.io.RSBagReader()
|
||
|
|
bag_reader.open(bag_filename)
|
||
|
|
im_rgbd = bag_reader.next_frame()
|
||
|
|
while not bag_reader.is_eof():
|
||
|
|
# process im_rgbd.depth and im_rgbd.color
|
||
|
|
im_rgbd = bag_reader.next_frame()
|
||
|
|
|
||
|
|
bag_reader.close()
|
||
|
|
|
||
|
|
### Examples
|
||
|
|
|
||
|
|
#### C++ RS bag file viewer
|
||
|
|
|
||
|
|
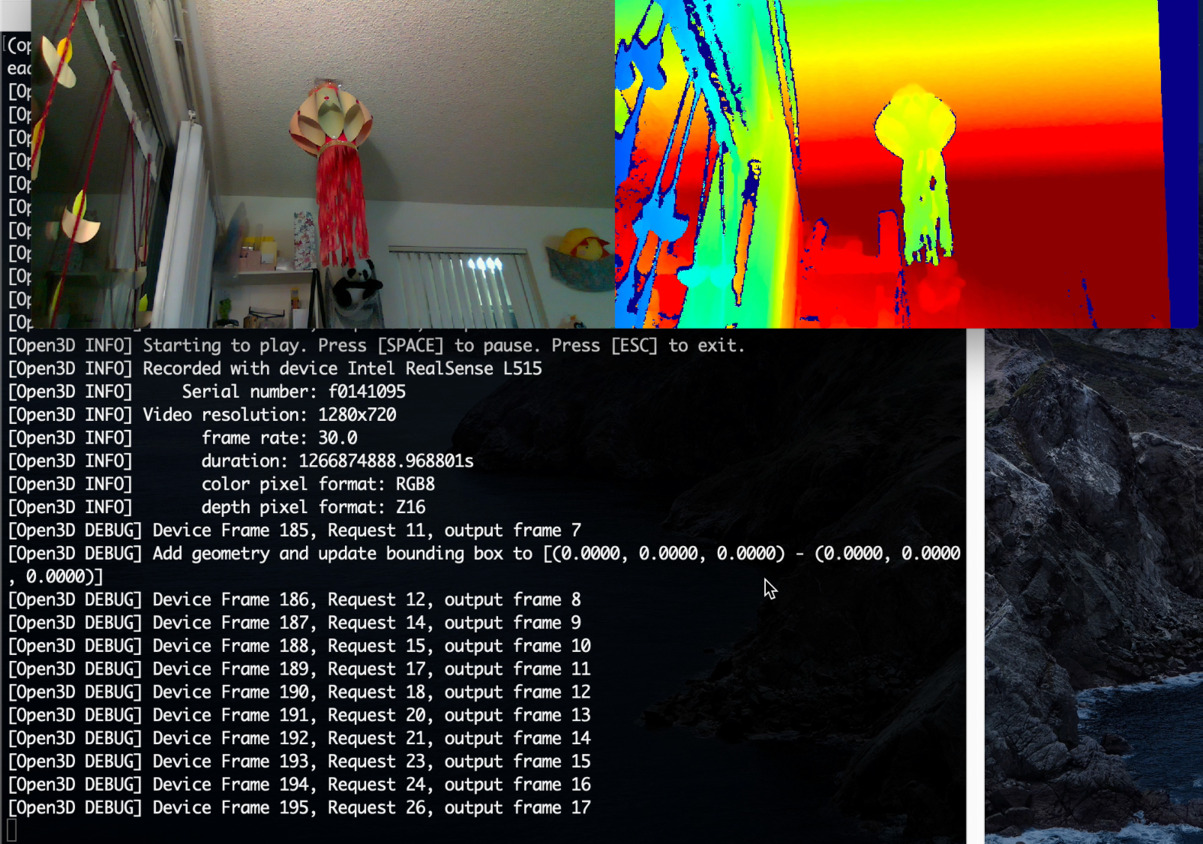
This C++ example that plays back the color and depth streams from a
|
||
|
|
RealSense bag file. It also prints out metadata about the video streams
|
||
|
|
in the file. Press [SPACE] to pause/resume and [ESC] to exit.:
|
||
|
|
|
||
|
|
make RealSenseBagReader
|
||
|
|
wrappers/open3d/RealSenseBagReader --input L515_test.bag
|
||
|
|
|
||
|
|
|
||
|
|
|
||
|
|
### Running the Open3D scene reconstruction pipeline
|
||
|
|
|
||
|
|
You can provide an RS bag file directly to the reconstruction pipeline (part of the Open3D Python
|
||
|
|
examples) and colormap optimization pipelines. It will be automatically converted to a directory of
|
||
|
|
depth and color frames and the camera intrinsics. Edit the
|
||
|
|
`examples/python/reconstruction_system/config/realsense.json` file with the path to your RS bag file
|
||
|
|
and leave path_intrinsic empty. Update other configuration parameters if needed (see the
|
||
|
|
reconstruction pipeline documentation for more details, including other required packages):
|
||
|
|
|
||
|
|
cd examples/python/reconstruction_system/
|
||
|
|
python run_system.py --make --register --refine --integrate config/realsense.json
|
||
|
|
python ../pipelines/color_map_optimization_for_reconstruction_system.py --config config/realsense.json
|
||
|
|
|
||
|
|
The reconstruction result below was obtained with the `L515_JackJack`
|
||
|
|
dataset with the configuration changes:
|
||
|
|
|
||
|
|
"path_dataset": "/path/to/downloaded/L515_JackJack.bag"
|
||
|
|
"max_depth": 0.85,
|
||
|
|
"tsdf_cubic_size": 0.75,
|
||
|
|
"voxel_size": 0.025,
|
||
|
|
"max_depth_diff": 0.03
|
||
|
|
|
||
|
|
<video width="800" controls
|
||
|
|
src="https://storage.googleapis.com/open3d-bin/docs/images/JackJack_colormap_opt_result.mp4"
|
||
|
|
type="video/mp4" autoplay>
|
||
|
|
Scene reconstruction sample result with RealSense bag input data
|
||
|
|
</video>
|
||
|
|
RealSense camera configuration, live capture, processing and recording
|
||
|
|
----------------------------------------------------------------------
|
||
|
|
|
||
|
|
### RealSense camera discovery
|
||
|
|
|
||
|
|
You can list all RealSense devices connected to the system and get their
|
||
|
|
capabilities (supported resolutions, frame rates, etc.) with the code
|
||
|
|
snippet below.
|
||
|
|
|
||
|
|
#include <open3d/Open3D.hpp>
|
||
|
|
open3d::t::io::RealSenseSensor::ListDevices();
|
||
|
|
|
||
|
|
import open3d as o3d
|
||
|
|
o3d.t.io.RealSenseSensor.list_devices()
|
||
|
|
|
||
|
|
Here is sample output when only one L515 camera is connected:
|
||
|
|
|
||
|
|
[Open3D INFO] [0] Intel RealSense L515: f0141095
|
||
|
|
[Open3D INFO] color_format: [RS2_FORMAT_BGR8 | RS2_FORMAT_BGRA8 | RS2_FORMAT_RGB8 | RS2_FORMAT_RGBA8 | RS2_FORMAT_Y16 | RS2_FORMAT_YUYV]
|
||
|
|
[Open3D INFO] color_resolution: [1280,720 | 1920,1080 | 960,540]
|
||
|
|
[Open3D INFO] color_fps: [15 | 30 | 6 | 60]
|
||
|
|
[Open3D INFO] depth_format: [RS2_FORMAT_Z16]
|
||
|
|
[Open3D INFO] depth_resolution: [1024,768 | 320,240 | 640,480]
|
||
|
|
[Open3D INFO] depth_fps: [30]
|
||
|
|
[Open3D INFO] visual_preset: [RS2_L500_VISUAL_PRESET_CUSTOM | RS2_L500_VISUAL_PRESET_DEFAULT | RS2_L500_VISUAL_PRESET_LOW_AMBIENT | RS2_L500_VISUAL_PRESET_MAX_RANGE | RS2_L500_VISUAL_PRESET_NO_AMBIENT | RS2_L500_VISUAL_PRESET_SHORT_RANGE]
|
||
|
|
[Open3D INFO] Open3D only supports synchronized color and depth capture (color_fps = depth_fps).
|
||
|
|
|
||
|
|
This data can also be obtained programmatically to configure a camera
|
||
|
|
based on custom specifications (e.g.: resolution less than 720p) and to
|
||
|
|
independently configure multiple cameras.
|
||
|
|
|
||
|
|
### RealSense camera configuration
|
||
|
|
|
||
|
|
RealSense cameras can be configured with a simple `json` configuration
|
||
|
|
file. See [RealSense
|
||
|
|
documentation](https://intelrealsense.github.io/librealsense/doxygen/rs__option_8h.html)
|
||
|
|
for the set of configuration values. Supported configuration options
|
||
|
|
will be depend on the device and other chosen options. Here are the
|
||
|
|
options supported by Open3D:
|
||
|
|
|
||
|
|
- **serial**: Pick a specific device, leave empty to pick the first
|
||
|
|
available device.
|
||
|
|
- **color_format**: Pixel format for color frames.
|
||
|
|
- **color_resolution**: (width, height): Leave 0 to let RealSense
|
||
|
|
pick a supported width or height.
|
||
|
|
- **depth_format**: Pixel format for depth frames.
|
||
|
|
- **depth_resolution**: (width, height): Leave 0 to let RealSense
|
||
|
|
pick a supported width or height.
|
||
|
|
- **fps**: Common frame rate for both depth and color streams. Leave 0
|
||
|
|
to let RealSense pick a supported frame rate.
|
||
|
|
- **visual_preset**: Controls depth computation on the device.
|
||
|
|
Supported values are specific to product line (D400, L500).
|
||
|
|
Leave empty to pick the default.
|
||
|
|
|
||
|
|
Here is an example `json` configuration file to capture 30fps, 540p
|
||
|
|
color and 480p depth video from any connected RealSense camera. The
|
||
|
|
video width is picked by RealSense. We also set the `visual_preset` to
|
||
|
|
`RS2_L500_VISUAL_PRESET_MAX_RANGE` to better capture far away objects.
|
||
|
|
|
||
|
|
{
|
||
|
|
"serial": "",
|
||
|
|
"color_format": "RS2_FORMAT_RGB8",
|
||
|
|
"color_resolution": "0,540",
|
||
|
|
"depth_format": "RS2_FORMAT_Z16",
|
||
|
|
"depth_resolution": "0,480",
|
||
|
|
"fps": "30",
|
||
|
|
"visual_preset": "RS2_L500_VISUAL_PRESET_MAX_RANGE"
|
||
|
|
}
|
||
|
|
|
||
|
|
### RealSense camera capture, processing and recording
|
||
|
|
|
||
|
|
The following code snippets show how to capture live RGBD video from a
|
||
|
|
RealSense camera. They capture the first 150 frames and also record them
|
||
|
|
to an RS bag file. The bag file can be played back with Open3D tools,
|
||
|
|
realsense-viewer. You can also use ROS tools such as
|
||
|
|
[rosbag](http://wiki.ros.org/rosbag),
|
||
|
|
[rqt\_bag](http://wiki.ros.org/rqt_bag) and
|
||
|
|
[rviz](https://wiki.ros.org/rviz) to examine, play and modify the bag
|
||
|
|
file. You can adapt the snippets to your needs by processing or
|
||
|
|
displaying the frames after capture.
|
||
|
|
|
||
|
|
#include <open3d/Open3D.hpp>
|
||
|
|
open3d::t::io::RealSenseSensorConfig rs_cfg;
|
||
|
|
open3d::io::ReadIJsonConvertible(config_filename, rs_cfg);
|
||
|
|
RealSenseSensor rs;
|
||
|
|
rs.InitSensor(rs_cfg, 0, bag_filename);
|
||
|
|
rs.StartCapture(true); // true: start recording with capture
|
||
|
|
for(size_t fid = 0; fid<150; ++fid) {
|
||
|
|
im_rgbd = rs.CaptureFrame(true, true); // wait for frames and align them
|
||
|
|
// process im_rgbd.depth_ and im_rgbd.color_
|
||
|
|
}
|
||
|
|
rs.StopCapture();
|
||
|
|
|
||
|
|
import json
|
||
|
|
import open3d as o3d
|
||
|
|
with open(config_filename) as cf:
|
||
|
|
rs_cfg = o3d.t.io.RealSenseSensorConfig(json.load(cf))
|
||
|
|
|
||
|
|
rs = o3d.t.io.RealSenseSensor()
|
||
|
|
rs.init_sensor(rs_cfg, 0, bag_filename)
|
||
|
|
rs.start_capture(True) # true: start recording with capture
|
||
|
|
for fid in range(150):
|
||
|
|
im_rgbd = rs.capture_frame(True, True) # wait for frames and align them
|
||
|
|
# process im_rgbd.depth and im_rgbd.color
|
||
|
|
|
||
|
|
rs.stop_capture()
|
||
|
|
|
||
|
|
Note that for any real time application such as live capture and
|
||
|
|
processing, it is important to complete frame processing in the frame
|
||
|
|
interval (\~33ms for 30fps recording). You may experience frame drops
|
||
|
|
otherwise. For high resolution capture, you can defer frame alignment by
|
||
|
|
setting `align_depth_to_color=false` during capture and performing it
|
||
|
|
while reading the bag file instead.
|
||
|
|
|
||
|
|
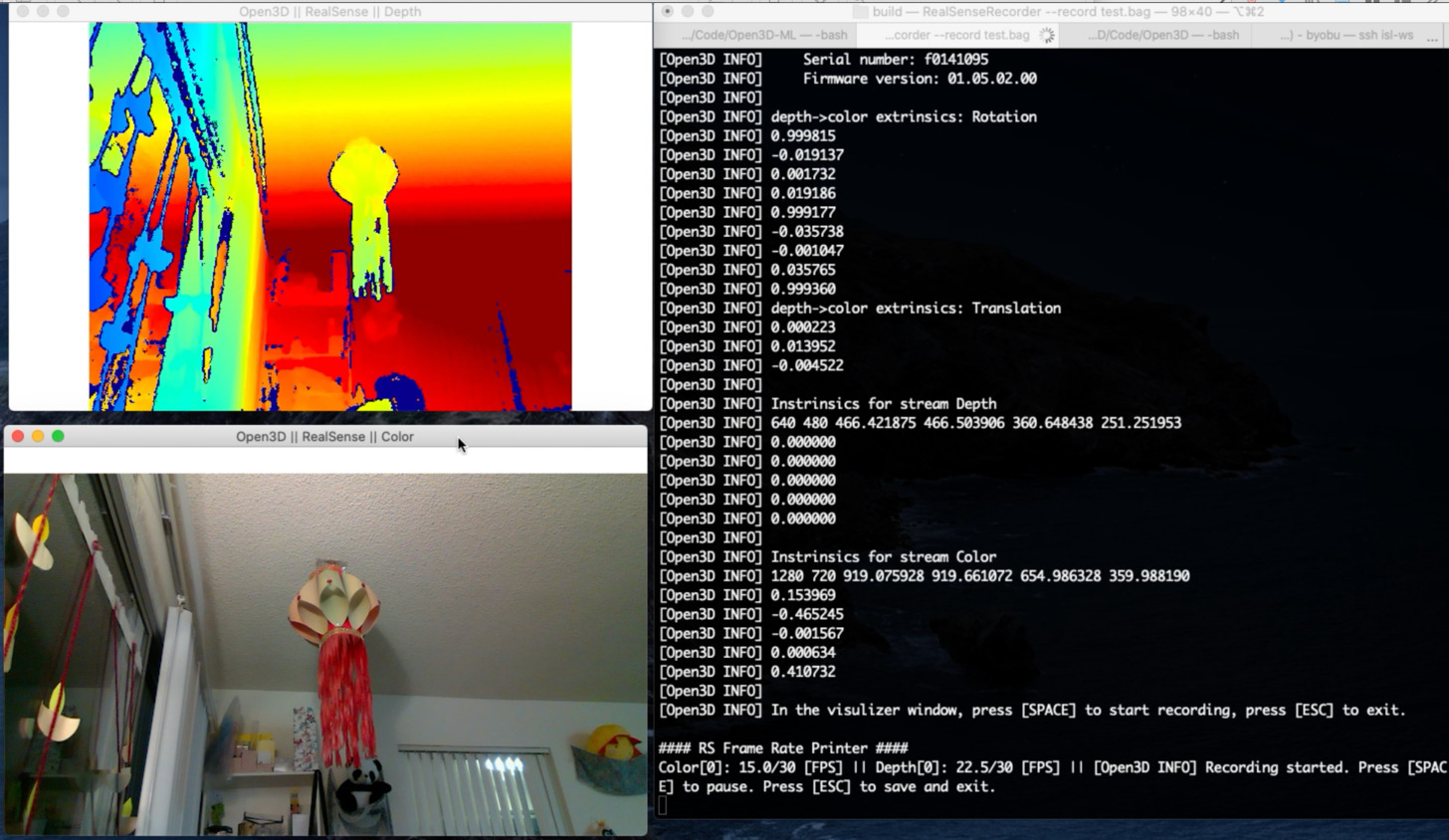
This is a complete C++ example that shows visualizing live capture and
|
||
|
|
recording to a bag file. The recording can be paused / resumed with
|
||
|
|
[SPACE]. Use [ESC] to stop capture and quit. You can use this example to
|
||
|
|
capture your own dataset:
|
||
|
|
|
||
|
|
make RealSenseRecorder
|
||
|
|
wrappers/open3d/RealSenseRecorder --config ../wrappers/open3d/rs_default_config.json --record test_data.bag
|
||
|
|
|
||
|
|
|