You can not select more than 25 topics
Topics must start with a letter or number, can include dashes ('-') and can be up to 35 characters long.
|
|
1 year ago | |
|---|---|---|
| .. | ||
| doc/img | 1 year ago | |
| src | 1 year ago | |
| .gitignore | 1 year ago | |
| CMakeLists.txt | 1 year ago | |
| README.md | 1 year ago | |
README.md
RealSense2 OpenNI2 driver
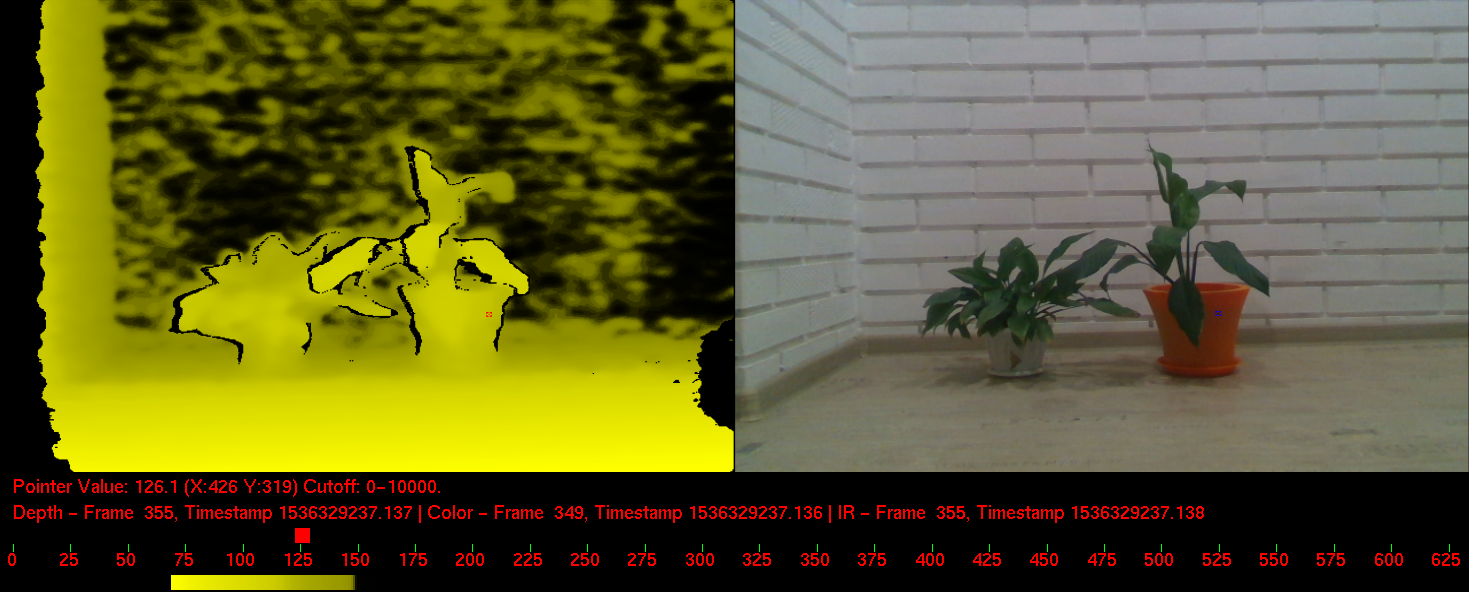 Picture: An example of OpenNI2 work with RealSense
Picture: An example of OpenNI2 work with RealSense
Allows to use RealSense2 hardware with OpenNI2
Current features:
- configure stream modes
- access live data (color/depth/IR)
- record and playback files
- depth to color mapping
- user tracking with NiTE2
- no code changes required
Getting started
Download OpenNI2 SDK
Download RealSense2 SDK
Run CMake on driver and configure SDK's:
- OPENNI2_DIR (For linux, the path may be "/usr/include/openni2")
- REALSENSE2_DIR
Generate project files and compile driver
For Windows, copy rs2driver.dll and realsense2.dll to OPENNI2_DIR/Samples/Bin/OpenNI2/Drivers/ For Linux, copy librs2driver.so and librealsense2.so to OPENNI2_DIR/Samples/Bin/OpenNI2/Drivers/
Launch any OpenNI2 example (SimpleRead SimpleViewer NiViewer) located at OPENNI2_DIR/Samples/Bin/
Examples
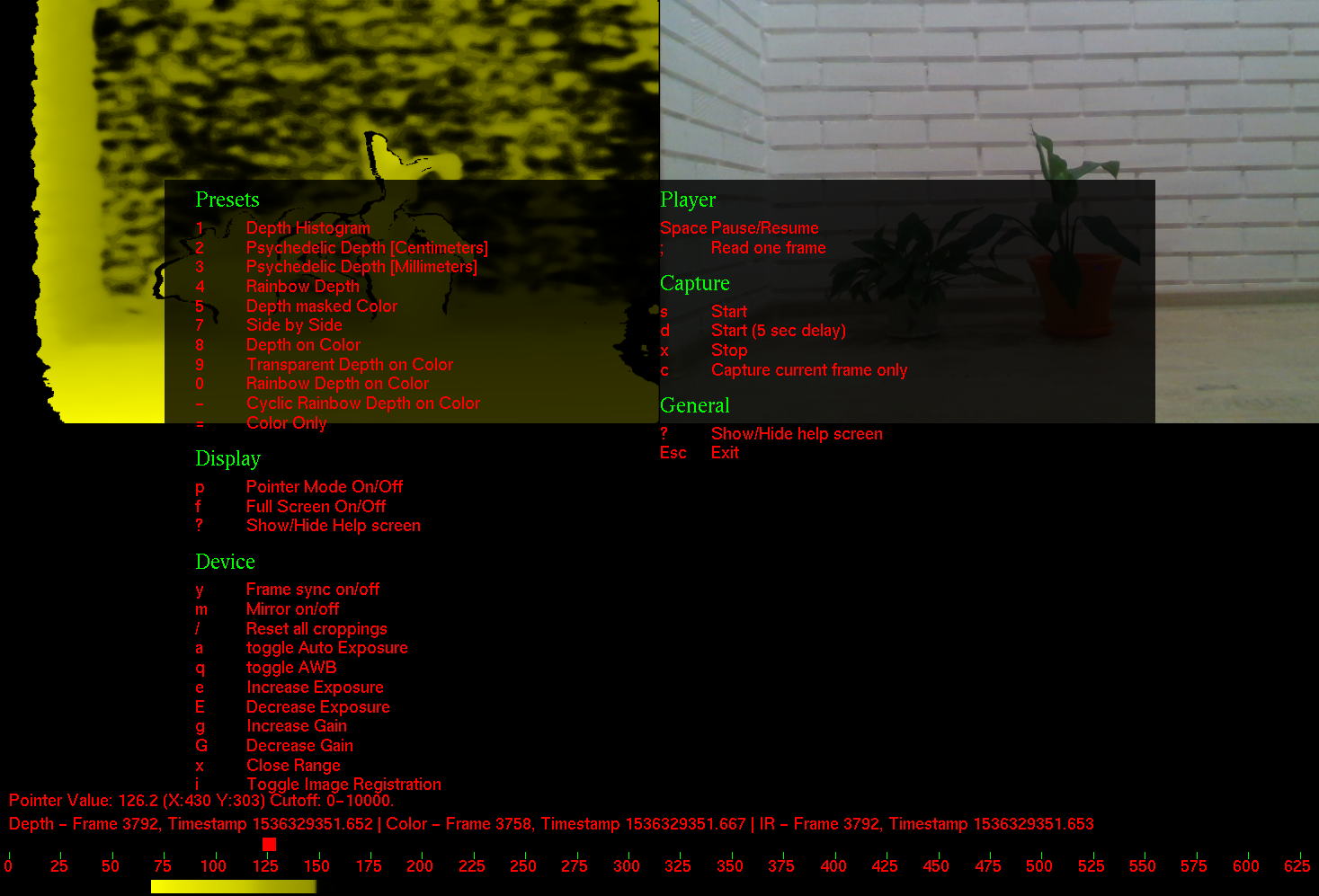 Picture: Show hotkeys
Picture: Show hotkeys
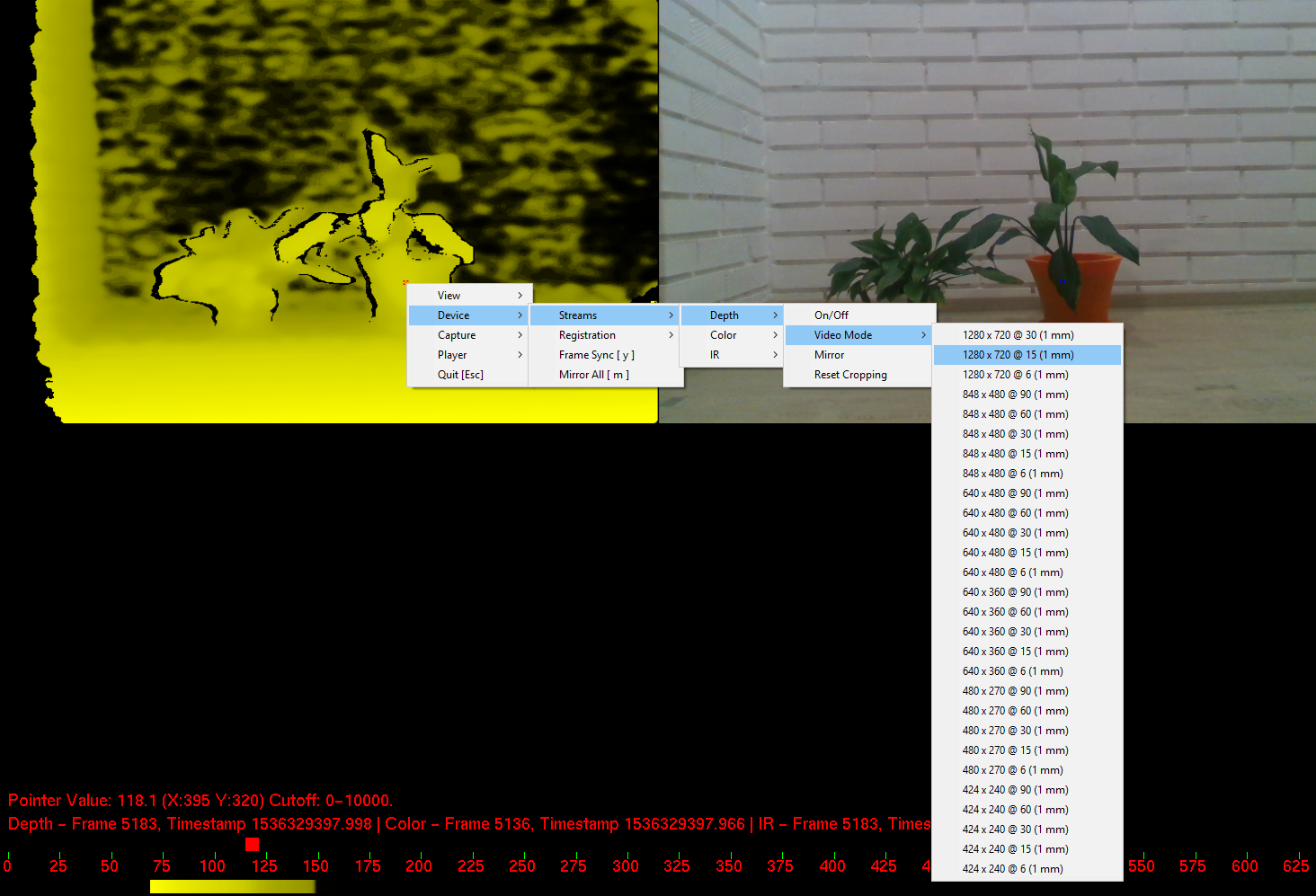 Picture: Configuring streams
Picture: Configuring streams
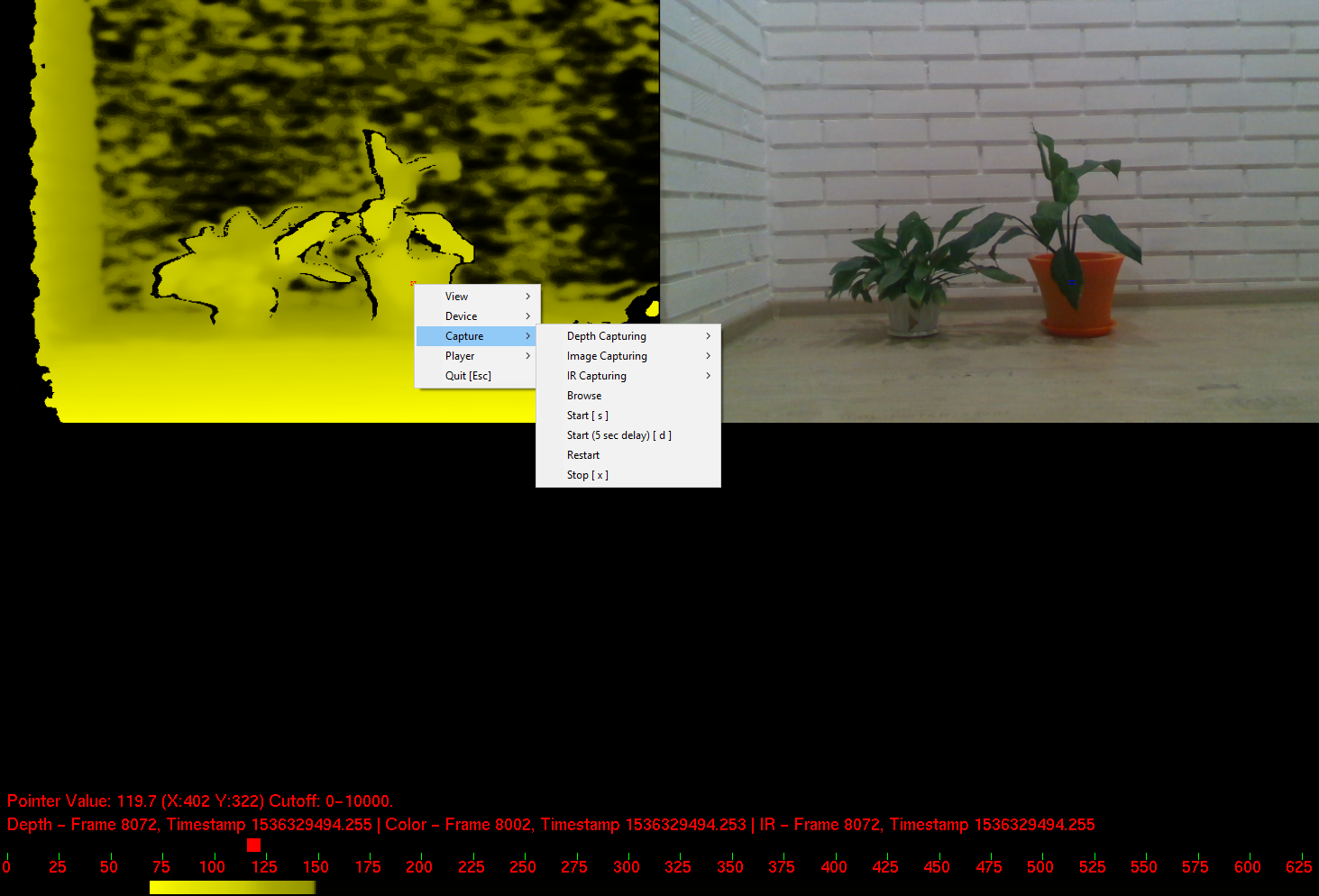 Picture: Configuring capture
Picture: Configuring capture
License
This project is licensed under the Apache License, Version 2.0.