You can not select more than 25 topics
Topics must start with a letter or number, can include dashes ('-') and can be up to 35 characters long.
233 lines
9.1 KiB
233 lines
9.1 KiB
# rs-measure Sample
|
|
|
|
## Overview
|
|
|
|
This tutorial shows simple method for measuring real-world distances using depth data.
|
|
> **Note:** Measuring dimensions of real-world objects is one of the obvious applications of a depth camera. This sample is not intended to be a proper measurement tool, but rather to showcase critical concepts.
|
|
> With better algorithms measurement results can be improved considerably.
|
|
|
|
In this tutorial you will learn how to:
|
|
|
|
* Spatially align color stream to depth (as opposed to depth-to-color alignment in [rs-align](../align))
|
|
* Leverage post-processing to handle missing or noisy depth data
|
|
* Convert between 2D pixels and points in 3D space
|
|
* Taking advantage of multiple cores to parallelize data flow
|
|
* Overlaying color on top of depth using OpenGL
|
|
|
|
|
|
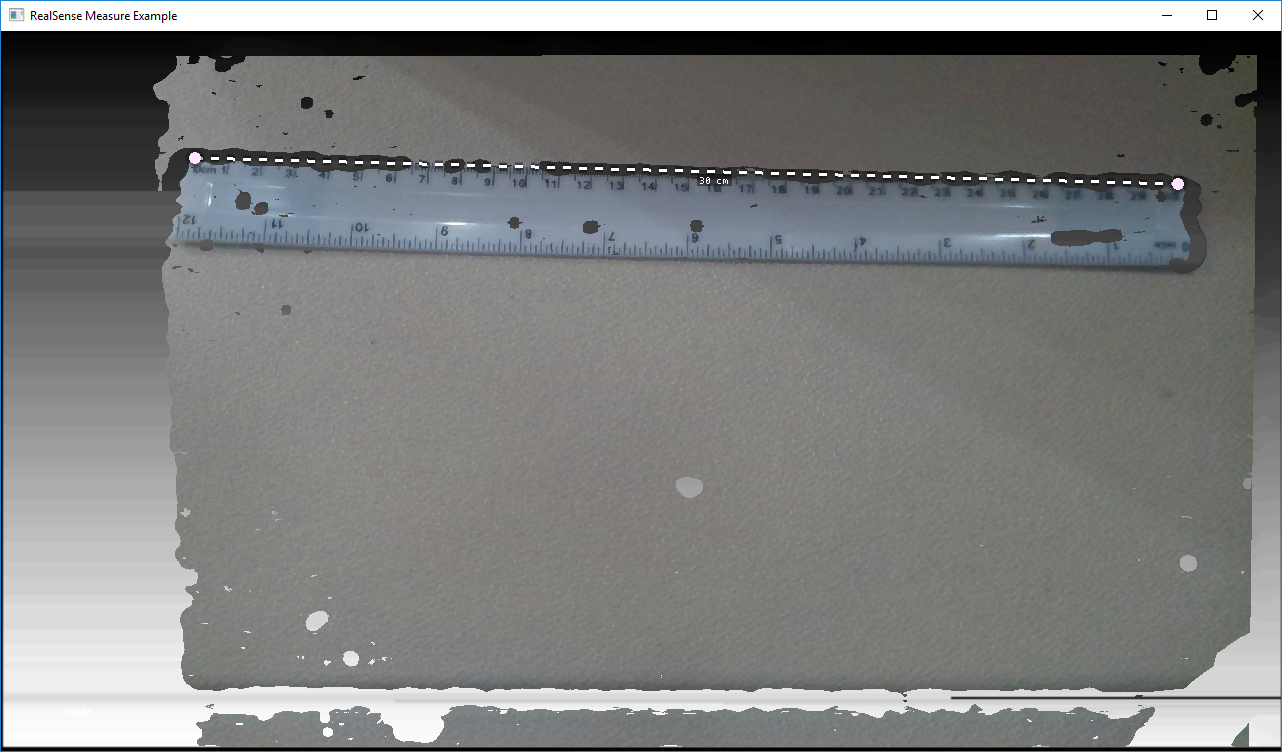
## Expected Output
|
|
|
|
|
|
This demo lets the user measure distance between two points in the physical world.
|
|
|
|
## Code Overview
|
|
|
|
### Depth Processing Pipeline
|
|
|
|
We start this example by defining all the processing blocks we are going to use:
|
|
|
|
```cpp
|
|
// Colorizer is used to visualize depth data
|
|
rs2::colorizer color_map;
|
|
// Use black to white color map
|
|
color_map.set_option(RS2_OPTION_COLOR_SCHEME, 2.f);
|
|
// Decimation filter reduces the amount of data (while preserving best samples)
|
|
rs2::decimation_filter dec;
|
|
// If the demo is too slow, make sure you run in Release (-DCMAKE_BUILD_TYPE=Release)
|
|
// but you can also increase the following parameter to decimate depth more (reducing quality)
|
|
dec.set_option(RS2_OPTION_FILTER_MAGNITUDE, 2);
|
|
// Define transformations from and to Disparity domain
|
|
rs2::disparity_transform depth2disparity;
|
|
rs2::disparity_transform disparity2depth(false);
|
|
// Define spatial filter (edge-preserving)
|
|
rs2::spatial_filter spat;
|
|
// Enable hole-filling
|
|
// Hole filling is an aggressive heuristic and it gets the depth wrong many times
|
|
// However, this demo is not built to handle holes
|
|
// (the shortest-path will always prefer to "cut" through the holes since they have zero 3D distance)
|
|
spat.set_option(RS2_OPTION_HOLES_FILL, 5); // 5 = fill all the zero pixels
|
|
// Define temporal filter
|
|
rs2::temporal_filter temp;
|
|
// Spatially align all streams to depth viewport
|
|
// We do this because:
|
|
// a. Usually depth has wider FOV, and we only really need depth for this demo
|
|
// b. We don't want to introduce new holes
|
|
rs2::align align_to(RS2_STREAM_DEPTH);
|
|
```
|
|
Next, we configure camera pipeline for depth + color streaming:
|
|
```cpp
|
|
// Declare RealSense pipeline, encapsulating the actual device and sensors
|
|
rs2::pipeline pipe;
|
|
|
|
rs2::config cfg;
|
|
cfg.enable_stream(RS2_STREAM_DEPTH); // Enable default depth
|
|
// For the color stream, set format to RGBA
|
|
// To allow blending of the color frame on top of the depth frame
|
|
cfg.enable_stream(RS2_STREAM_COLOR, RS2_FORMAT_RGBA8);
|
|
auto profile = pipe.start(cfg);
|
|
```
|
|
|
|
Our goal is to generate depth without any holes, since these are going to pose an immediate problem to our algorithm.
|
|
The best way to reduce the number of missing pixels is by letting the hardware do it.
|
|
The D400 cameras have a **High Density** preset we can take advantage of.
|
|
```cpp
|
|
auto sensor = profile.get_device().first<rs2::depth_sensor>();
|
|
|
|
// Set the device to High Accuracy preset
|
|
auto sensor = profile.get_device().first<rs2::depth_sensor>();
|
|
sensor.set_option(RS2_OPTION_VISUAL_PRESET, RS2_RS400_VISUAL_PRESET_HIGH_ACCURACY);
|
|
```
|
|
|
|
Given a frame-set, we are going to apply all the processing blocks in order.
|
|
First we apply the `align` processing block to align color frame to depth viewport:
|
|
```cpp
|
|
// First make the frames spatially aligned
|
|
data = align_to.process(data);
|
|
```
|
|
|
|
Next, we invoke the depth post-processing flow:
|
|
```cpp
|
|
rs2::frame depth = data.get_depth_frame();
|
|
// Decimation will reduce the resultion of the depth image,
|
|
// closing small holes and speeding-up the algorithm
|
|
depth = dec.process(depth);
|
|
// To make sure far-away objects are filtered proportionally
|
|
// we try to switch to disparity domain
|
|
depth = depth2disparity.process(depth);
|
|
// Apply spatial filtering
|
|
depth = spat.process(depth);
|
|
// Apply temporal filtering
|
|
depth = temp.process(depth);
|
|
// If we are in disparity domain, switch back to depth
|
|
depth = disparity2depth.process(depth);
|
|
// Send the post-processed depth for path-finding
|
|
pathfinding_queue.enqueue(depth);
|
|
```
|
|
> All **stereo-based** 3D cameras have the property of noise being proportional to distance squared.
|
|
> To counteract this we transform the frame into **disparity-domain** making the noise more uniform across distance.
|
|
> This will do nothing on our **structured-light** cameras (since they don't have this property).
|
|
|
|
We also apply the standard color map:
|
|
```cpp
|
|
// Apply color map for visualization of depth
|
|
auto colorized = color_map(depth);
|
|
```
|
|
|
|
### Converting between pixels and points in 3D
|
|
|
|
To convert pixels in the depth image into 3D points we are calling `rs2_deproject_pixel_to_point` C function (declared in `rsutil.h`).
|
|
This function needs depths intrinsics, 2D pixel and distance in meters. Here is how we fetch depth intrinsics:
|
|
```cpp
|
|
auto stream = profile.get_stream(RS2_STREAM_DEPTH).as<rs2::video_stream_profile>();
|
|
auto intrinsics = stream.get_intrinsics(); // Calibration data
|
|
```
|
|
|
|
Distance in meters can be acquired using `get_distance` function of `depth_frame` class.
|
|
|
|
> Calling `get_distance` excessively can result in bad performance, since the compiler can't optimize across module boundaries, so it could be beneficial to read the `DEPTH_UNITS` option directly from the `depth_sensor` and use it to convert raw depth pixels to meters.
|
|
|
|
Putting everything together results in rather verbose `dist_3d` function:
|
|
```cpp
|
|
float dist_3d(const rs2_intrinsics& intr, const rs2::depth_frame& frame, pixel u, pixel v)
|
|
{
|
|
float upixel[2]; // From pixel
|
|
float upoint[3]; // From point (in 3D)
|
|
|
|
float vpixel[2]; // To pixel
|
|
float vpoint[3]; // To point (in 3D)
|
|
|
|
// Copy pixels into the arrays (to match rsutil signatures)
|
|
upixel[0] = u.first;
|
|
upixel[1] = u.second;
|
|
vpixel[0] = v.first;
|
|
vpixel[1] = v.second;
|
|
|
|
// Query the frame for distance
|
|
// Note: this can be optimized
|
|
// It is not recommended to issue an API call for each pixel
|
|
// (since the compiler can't inline these)
|
|
// However, in this example it is not one of the bottlenecks
|
|
auto udist = frame.get_distance(upixel[0], upixel[1]);
|
|
auto vdist = frame.get_distance(vpixel[0], vpixel[1]);
|
|
|
|
// Deproject from pixel to point in 3D
|
|
rs2_deproject_pixel_to_point(upoint, &intr, upixel, udist);
|
|
rs2_deproject_pixel_to_point(vpoint, &intr, vpixel, vdist);
|
|
|
|
// Calculate euclidean distance between the two points
|
|
return sqrt(pow(upoint[0] - vpoint[0], 2) +
|
|
pow(upoint[1] - vpoint[1], 2) +
|
|
pow(upoint[2] - vpoint[2], 2));
|
|
}
|
|
```
|
|
|
|
### Running Processing on a Background Thread
|
|
|
|
Post-processing calculations in this example can be relatively slow. To not block the main (UI) thread, we are going to have a dedicated thread for post-processing.
|
|
|
|
#### Video-Processing Thread
|
|
|
|
This thread will consume full frame-sets from the camera, and will produce frame-sets containing color and colorized depth frames (for rendering on the main thread):
|
|
```cpp
|
|
while (alive)
|
|
{
|
|
// Fetch frames from the pipeline and send them for processing
|
|
rs2::frameset fs;
|
|
if (pipe.poll_for_frames(&fs))
|
|
{
|
|
// Apply post processing
|
|
// ...
|
|
|
|
// Send resulting frames for visualization in the main thread
|
|
postprocessed_frames.enqueue(data);
|
|
}
|
|
}
|
|
```
|
|
|
|
#### Main Thread
|
|
|
|
The main thread is the only one allowed to render to the screen.
|
|
|
|
It polls from the `postprocessed_frames` queue and just displays the results:
|
|
|
|
```cpp
|
|
while(app) // Application still alive?
|
|
{
|
|
postprocessed_frames.poll_for_frame(¤t_frameset);
|
|
|
|
if (current_frameset)
|
|
{
|
|
auto depth = current_frameset.get_depth_frame();
|
|
auto color = current_frameset.get_color_frame();
|
|
|
|
glEnable(GL_BLEND);
|
|
// Use the Alpha channel for blending
|
|
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
|
|
|
|
// First render the colorized depth image
|
|
depth_image.render(depth, { 0, 0, app.width(), app.height() });
|
|
// Next, set global alpha for the color image to 90%
|
|
// (to make it slightly translucent)
|
|
glColor4f(1.f, 1.f, 1.f, 0.9f);
|
|
// Render the color frame (since we have selected RGBA format
|
|
// pixels out of FOV will appear transparent)
|
|
color_image.render(color, { 0, 0, app.width(), app.height() });
|
|
|
|
// Render the simple pythagorean distance
|
|
render_simple_distance(depth, app_state, app, intrinsics);
|
|
|
|
// Render the ruler
|
|
app_state.ruler_start.render(app);
|
|
app_state.ruler_end.render(app);
|
|
|
|
glDisable(GL_BLEND);
|
|
}
|
|
}
|
|
```
|
|
We use `glBlendFunc` to overlay aligned-color on top of depth using colors alpha channel (the stream must be of format `RGBA` for this to work).
|
|
|
|
----------------------------------
|
|
|
|
This example demonstrates a short yet complex processing flow. Each thread has somewhat different rate and they all need to synchronize but not block one another.
|
|
This is achieved using thread-safe `frame_queue`s as synchronization primitives and `rs2::frame` reference counting for object lifetime management across threads.
|