readme.md
Getting Started with RealSense™ SDK2.0 for Matlab®
Introduction:
The latest generation of RealSense Depth Cameras can be controlled via the RealSense SDK2.0, also referred to as libRealSense 2.x.x, or LibRS for short. This includes stereo depth cameras D415 and D435 as well as their corresponding modules, such as D410 and D430.
To get started controlling the RealSense Cameras with Matlab® in Windows 10, we have created a package that wraps some of the core functions of the realsense2.dll, and we have also created a simple “Hello World” function to get started capturing depth data. This uses Matlab R2017b and requires a Windows 10 laptop with a USB3 port.
Getting Started
Building from Source
- Download the Git repository. Opt in the Matlab wrapper for LibRs with
cmake .. -D... -DBUILD_MATLAB_BINDINGS:BOOL=ONwhen configuring CMake. - Build the
librealsense_mextarget. - After compiling the project, set build/Debug or build/Release as your Matlab working directory. Alternatively copy the
+realsensefolder from there to a place where Matlab can find it. - Start exploring with Realsense devices by typing at the Matlab prompt:
realsense.depth_example- Capture and render Depth frame with a live device.
realsense.rosbag_example- Playback pre-recorded video and data streams stored in rosbag format.
realsense.pointcloud_example- Generate and visualize 3D point cloud from live stream.
realsense.depth_view_example- Capture and render Depth example based on apps.AppBase component.
realsense.capture_example- Capture and render multiple streams
Windows Installer
-
Run the Windows Installer and select the Matlab Developer Package checkbox.
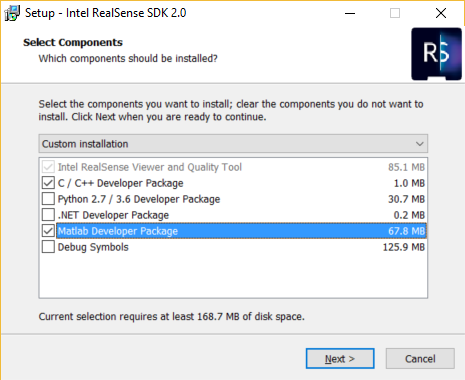
-
Allow the installer to complete
-
The package will be installed to
C:\Program Files (x86)\Intel RealSense SDK 2.0\matlab\+realsense\. You can copy it from here to a place where Matlab can find it or add it to Matlab's path
Examples
Displaying a frame using realsense.pipeline
function depth_example()
% Make Pipeline object to manage streaming
pipe = realsense.pipeline();
% Make Colorizer object to prettify depth output
colorizer = realsense.colorizer();
% Start streaming on an arbitrary camera with default settings
profile = pipe.start();
% Get streaming device's name
dev = profile.get_device();
name = dev.get_info(realsense.camera_info.name);
% Get frames. We discard the first couple to allow
% the camera time to settle
for i = 1:5
fs = pipe.wait_for_frames();
end
% Stop streaming
pipe.stop();
% Select depth frame
depth = fs.get_depth_frame();
% Colorize depth frame
color = colorizer.colorize(depth);
% Get actual data and convert into a format imshow can use
% (Color data arrives as [R, G, B, R, G, B, ...] vector)
data = color.get_data();
img = permute(reshape(data',[3,color.get_width(),color.get_height()]),[3 2 1]);
% Display image
imshow(img);
title(sprintf("Colorized depth frame from %s", name));
end